Georges Giralt, Raja Chatila, and Marc Vaisset
¿Por qué esta relacionado con automatización y control?
El robot HILARE es un robot móvil, multisensor y autónomo que utiliza sensores para obtener información de su alrededor y poder realizar movimientos. La manera en que se controlan los sistemas de percepción para obtener la posición del robot y saber que hacer cuando haya objetos en su vecinidad(rodear, esquivar) esta relacionado con cosas que hemos visto en la materia.
Resumen
El artículo se centra en HILARE un proyecto de un robot móvil. El proyecto empezó alrededor de 1977 y se centraba en el control de los robots para mejorar su percepción y planeación de movimientos.
Diseño Físico
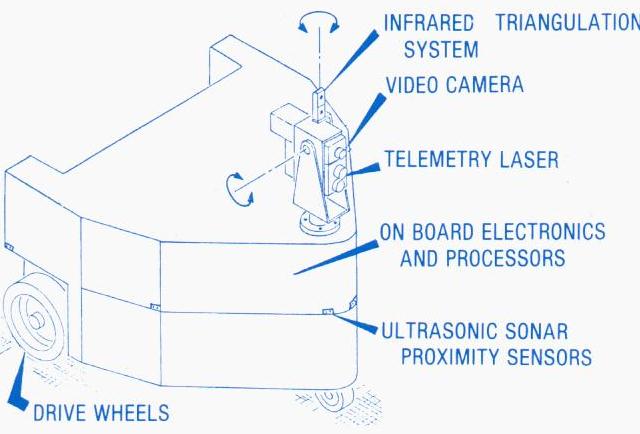
El robot cuenta con 3 ruedas, dos ruedas traseras con motores de paso, y la rueda delantera siendo libre para realizar prácticamente cualquier movimiento. Físicamente se ve como el siguiente:

El sistema computacional que soporta las funciones del robot esta distribuido en una arquitectura multinivel. Varios microprocesadores están comunicados mediante señal de radio a una computadora de 32-bits, dando acceso a uno o varios procesadores más poderosos.

Sistema de Percepción
El sistema de percepción está compuesto por dos subsistemas, el de visión y el ultrasónico, estos usados para proveer al robot de la información necesaria del ambiente que lo rodea.
Sistema Ultrasónico
14 emisores y receptores ultrasónicos distribuidos en el robot son utilizados para obtener información con un alcance de hasta 2m.
Esto tiene dos funciones:
- Alarma: Avisa al robot de la vecinidad de un objeto, para que pueda detenerse por completo si es que está en movimiento, aunque algunas veces sirve para que pueda rodearlo o alejarse de él.
- Evadir obstáculos: La información obtenida por el sistema ultrasónico es usada para maniobrar y evitar los obstáculos, alejándose a una distancia fija de ellos.
Sistema de Visión
El sistema de visión es el principal sistema de percepción del robot. Para este sistema se utiliza una cámara y un láser para medir profundidad. Es posible utilizar el láser en un modo de escaneo, utilizando un espejo retractil para obtener datos 3D alrededor del robot, efectivamente mapeando el área.
Posición del robot
La posición de HILARE puede ser obtenida utilizando un sistema de triangulación infrarroja. Estas funcionan gracias a balizas instaladas en el área previamente, de esta manera se puede triangular la señal infrarroja y encontrar la posición del robot.
También es posible obtener la posición usando como referencia objetos a su alrededor.
Sistema de Navegación
La navegación de HILARE es manejada por los sensores, y dependiente del ambiente. El sistema de navegación y control de movimientos domina todo lo que concierne a todas las actividades móviles del robot.
Los procedimientos básicos que usa son ruteo, navegación, visión de bajo nivel, locomoción, búsqueda de posición y evitar obstáculos locales. Para esto se hace uso de los sensores mencionados previamente.
El funcionamiento sistema de navegación inicia con el análisis del mapa de obstáculos. Las áreas vacías entre obstáculos son diseñadas como "células" (polígonos convexos). Cada límite de cada célula tiene asociada una entrada de un segmento de salida. Un grafo de búsqueda es generado usando las células y sus límites, y entonces este grafo es al cual se busca una solución para encontrar el camino más corto.

Representación celular usada por HILARE.
Referencias extras:
- Autonomous Mobile Robots: Vehicles With Cognitive Control - By Alex Meystel
1977 – “HILARE” Autonomous Mobile Robot – French
6 pts extra para RG
ResponderEliminar